First attempt with RealSense D435i
Installed the drivers for RealSense D435i, and realsense-view works directly.
Installation under Ubuntu 16.04 with Linux kernel 4.15.0-43. I followed the steps as instructed in Intel’s installation walkthrough:
sudo apt-key adv --keyserver keys.gnupg.net --recv-key C8B3A55A6F3EFCDE || sudo apt-key adv --keyserver hkp://keyserver.ubuntu.com:80 --recv-key C8B3A55A6F3EFCDE
sudo add-apt-repository "deb http://realsense-hw-public.s3.amazonaws.com/Debian/apt-repo xenial main" -u
sudo rm -f /etc/apt/sources.list.d/realsense-public.list
sudo apt-get update
sudo apt-get install librealsense2-dkms
sudo apt-get install librealsense2-utils
sudo apt-get install librealsense2-dev
sudo apt-get install librealsense2-dev
Afterwards, I rebooted my laptop and started realsense-viewer, and it just worked. Data collected through the GUI is shown below.
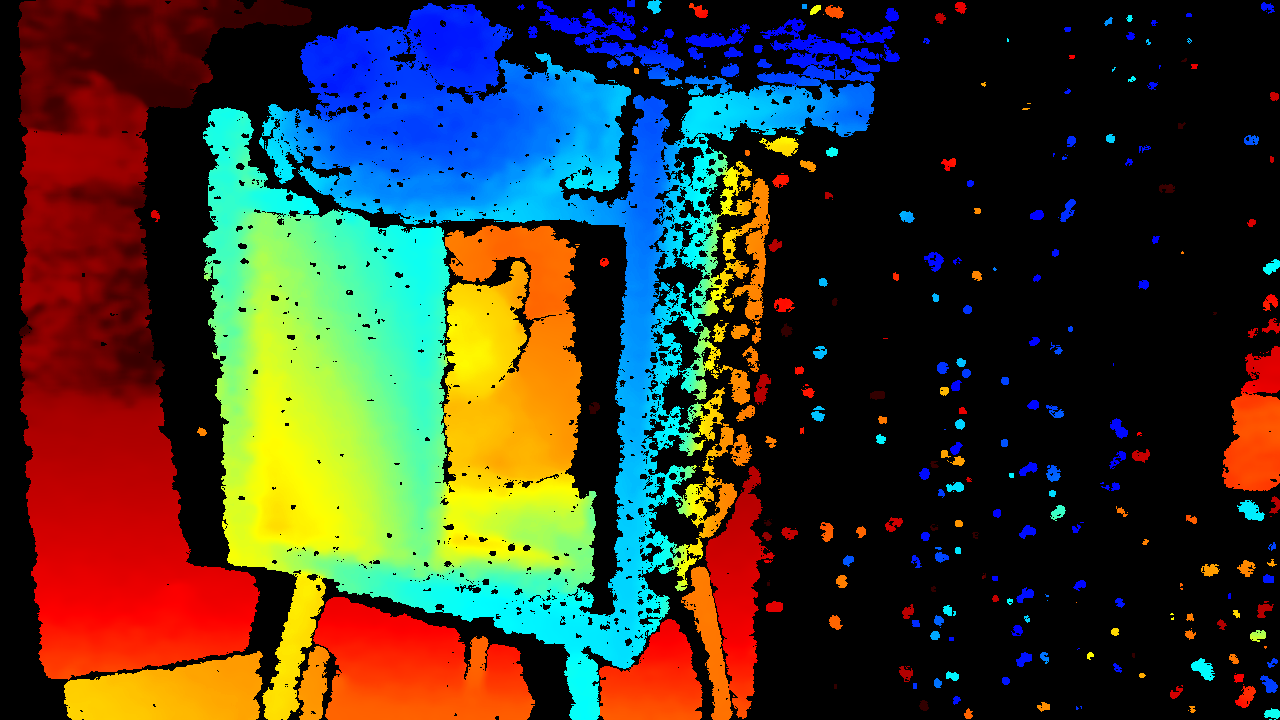

A picture of my cat, captured with the RealSense D435i and its GUI, realsense-viewer. First: depth image. Second: ‚regular’ color image. Notice on the second image the little red dots on the table leg, which indicate at least a structured light approach built into the D435i.
Some errors did occur though.
No accelerometer data
This problem manifests in two ways.
Firstly, when recording a rosbag through the realsense-viewer GUI, the /device_0/sensor_2/Accel_0/imu/data topic has 0 messages. The /device_0/sensor_2/Gyro_0/imu/data topic contains sensor_msgs/Imu messages, but the linear_acceleration field is always set to [0 0 0].
The second way shows up in the realsense-viewer GUI. When toggling on the „Motion Module” in realsense-viewer, two windows should appear, displaying Gyro and Accel stream visualizations. The Accel window always displays an error: „⚠️ No Frames Received!” on a white background. Sometimes, the Accel window does not display at regular width, but is reduced to a really narrow window. Widening the window shows the same thing as a „regularly sized” window.
Mysterious device error
When toggling off the „Motion Module” in realsense-viewer, an error message appears sometimes:
Backend in rs2_stop(sensor:0x1a0ab80):
Failed to enable_sensor /sys/devices/pci0000:00/0000:00:14.0/usb4/4-1/4-1:1.5/0003:8086:0B3A.0008/HID-SENSOR-2000e1.4.auto/enable_sensor Last Error: No such file or directory
Not sure what this means. Not sure about the conditions to get this error.
I inspected the exported configuration file custom.json to see if there is any setting about the IMU settings. I found nothing yet. Just assuming this is a fluke for now.
To do next time
- Get the ROS wrapper for the D435i working